Projects
- TruckBot Autonomous Truck Trailer and Shipping Container Unloader Debuts at ProMat 2023
-
As a computer vision engineer at Mujin,
Inc.
- ProMat, 2023
-
- iMODE: Real-Time Incremental Monocular Dense Mapping Using Neural Field
-
Hidenobu Matsuki,
Edgar Sucar,
Tristan Laidow,
Kentaro Wada,
Raluca Scona,
Andrew J. Davison
- IEEE International Conference on Robotics and Automation (ICRA), 2023
-
- Robotic Manipulation in Clutter with Object-Level Semantic Mapping
-
Kentaro Wada
- PhD Thesis, Imperial College London, Department of Computing, 2022
-
- ReorientBot: Learning Object Reorientation for Specific-Posed Placement
-
Kentaro Wada,
Stephen James,
Andrew J. Davison
- IEEE International Conference on Robotics and Automation (ICRA), 2022
-
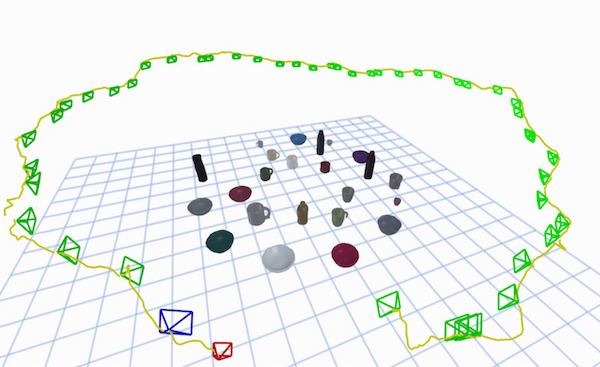
- SafePicking: Learning Safe Object Extraction via Object-Level Mapping
-
Kentaro Wada,
Stephen James,
Andrew J. Davison
- IEEE International Conference on Robotics and Automation (ICRA), 2022
-
- Coarse-to-Fine Q-attention: Efficient Learning for Visual Robotic Manipulation via Discretisation
-
Stephen James,
Kentaro Wada,
Tristan Laidlow,
Andrew J. Davison
- arXiv:2106.12534, 2021
-
- NodeSLAM: Neural Object Descriptors for Multi-View Shape Reconstruction
-
Edgar Sucar,
Kentaro Wada,
Andrew J. Davison
- IEEE International Conference on 3D Vision (3DV), 2020
-
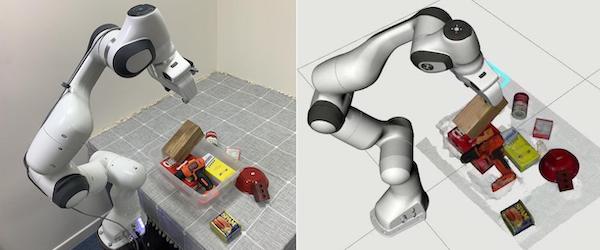
- MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric Fusion
-
Kentaro Wada,
Edgar Sucar,
Stephen James,
Daniel Lenton,
Andrew J. Davison
- IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020
-
- Joint Learning of Instance and Semantic Segmentation for Robotic Pick-and-Place with Heavy Occlusions in Clutter
-
Kentaro Wada,
Kei Okada,
Masayuki Inaba
- IEEE International Conference on Robotics and Automation (ICRA), 2019
-
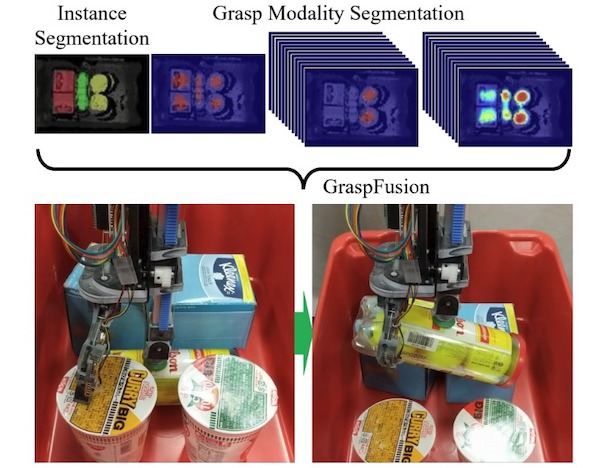
- GraspFusion: Realizing Complex Motion by Learning and Fusing Grasp Modalities with Instance Segmentation
-
Shun Hasegawa*,
Kentaro Wada*,
Shingo Kitagawa,
Yuto Uchimi,
Kei Okada,
Masayuki Inaba
- IEEE International Conference on Robotics and Automation (ICRA), 2019
- (Won IEEE RAS JJC Young Award as one of the 5 Japanese students.)
-
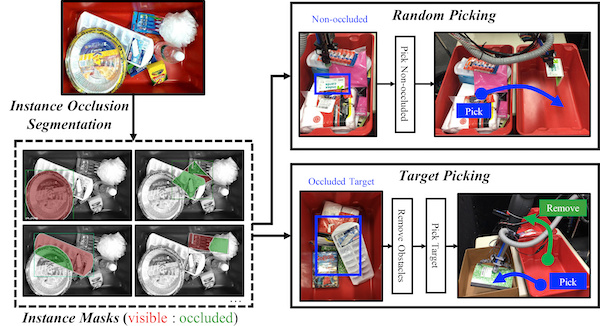
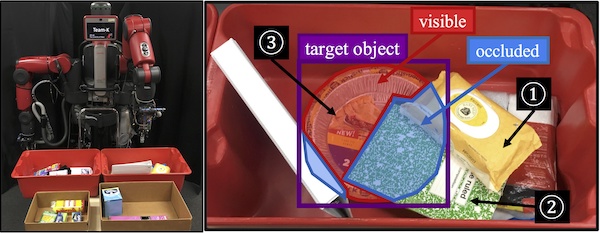
- Instance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of Objects
-
Kentaro Wada,
Shingo Kitagawa,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2018
- (Won IEEE RAS JJC Young Award as one of the 5 Japanese students.)
-
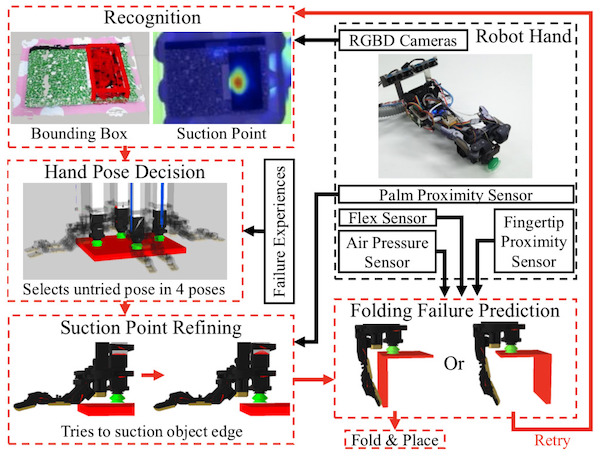
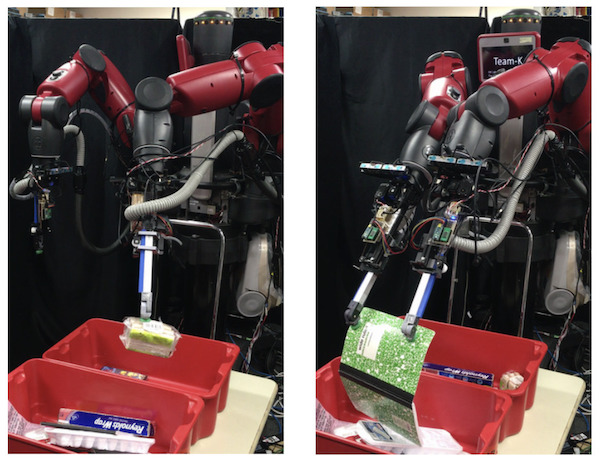
- Detecting and Picking of Folded Objects with a Multiple Sensor Integrated Robot Hand
-
Shun Hasegawa,
Kentaro Wada,
Shingo Kitagawa,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2018
-
- Multi-stage Learning of Selective Dual-arm Grasping Based on Obtaining and Pruning Grasping Points Through the Robot Experience in the Real World
-
Shingo Kitagawa,
Kentaro Wada,
Shun Hasegawa,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2018
-
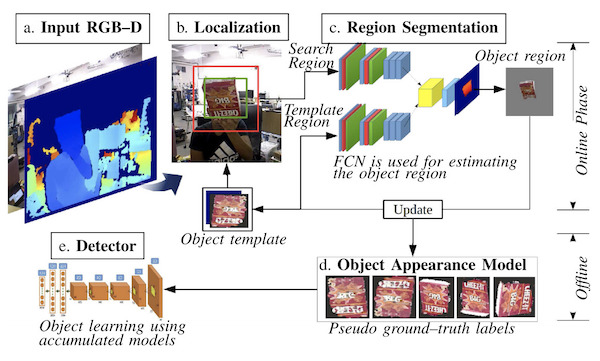
- Learning to Segment Generic Handheld Objects Using Class–Agnostic Deep Comparison and Segmentation Network
-
Krishneel Chaudhary,
Kentaro Wada,
Xiangyu Chen,
Kohei Kimura,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2018
-
- Learning-Based Task Failure Prediction for Selective Dual-Arm Manipulation in Warehouse Stowing
-
Shingo Kitagawa,
Kentaro Wada,
Kei Okada,
Masayuki Inaba
- International Conference on Intelligent Autonomous Systems (IAS), 2018
-
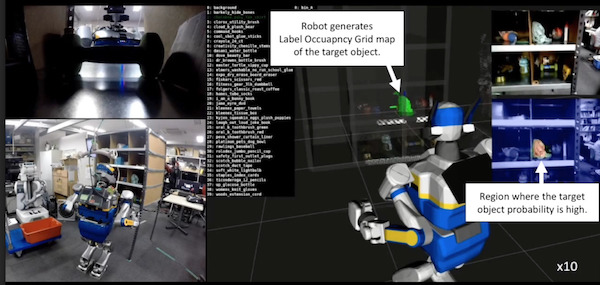
- Probabilistic 3D Multilabel Real-time Mapping for Multi-object Manipulation
-
Kentaro Wada,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2017
-
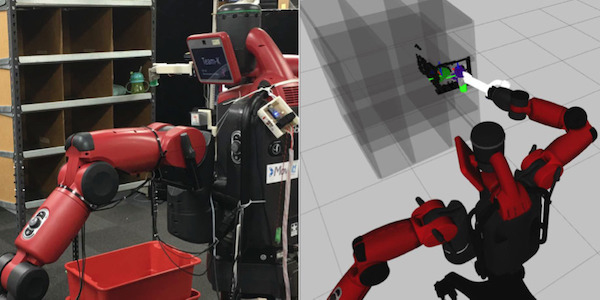
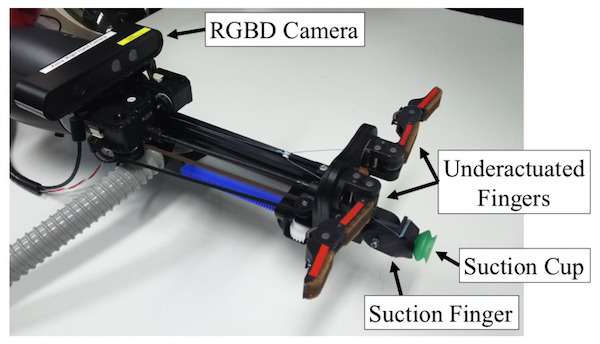
- A Three-Fingered Hand with a Suction Gripping System for Picking Various Objects in Cluttered Narrow Space
-
Kentaro Wada,
Shun Hasegawa,
Kei Okada,
Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2017
-
- Pick-and-Verify: Verification-based Highly Reliable Picking System for Various Target Objects in Clutter
-
Kentaro Wada,
Makoto Sugiura,
Iori Yanokura,
Yuto Inagaki,
Kei Okada,
Masayuki Inaba
- Journal of Advanced Robotics, 2016
-
- 3D Object Segmentation for Shelf Bin Picking by Humanoid with Deep Learning and Occupancy Voxel Grid Map
-
Kentaro Wada,
Masaki Murooka,
Kei Okada,
Masayuki Inaba
- IEEE International Conference on Humanoid Robotics (Humanoids), 2016
-
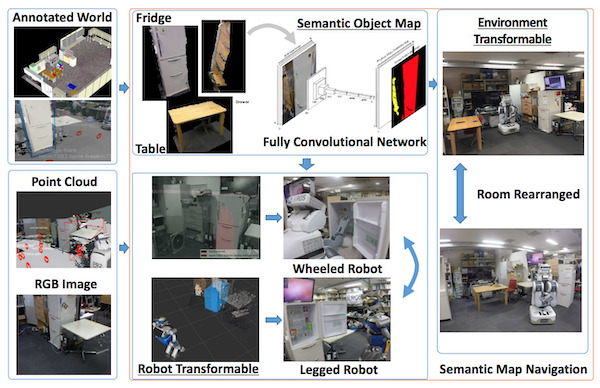
- Transformable Semantic Map Based Navigation using Autonomous Deep Learning Object Segmentation
-
Yuki Furuta,
Kentaro Wada,
Masaki Murooka,
Shunichi Nozawa,
Yohei Kakiuchi,
Kei Okada,
Masayuki Inaba
- IEEE International Conference on Humanoid Robotics (Humanoids), 2016
-
Other Projects
- Team-K at International Amazon Robotics Challenge 2017
-
Shun Hasegawa*,
Shingo Kitagawa*,
Kentaro Wada*,
Yuto Uchimi,
Naoya Yamaguchi,
Kei Okada
- Robocup, 2017
- (12th/13th place among 16 teams in pick/stow tasks. Actually, we had a hardware problem while pick task.)
-
- Team-K at International Amazon Picking Challenge 2016
-
Kentaro Wada,
Shun Hasegawa,
Shingo Kitagawa,
Yusuke Niitani,
Masahiro Bando,
Kei Okada
- Robocup, 2016
- (Got 5th place at pick task and 8th place at stow task among 16 teams)
-
- Reactive and Adaptive Path Planning Using Sensor Feedback and Operator Input
-
Kentaro Wada,
Shaun Edwards,
Fred Proctor
- Google Summer of Code (GSoC) 2016, 2016
-
- Team-K at International Amazon Picking Challenge 2015
-
Kentaro Wada*,
Iori Yanokura*,
Yuto Inagaki*,
Makoto Sugiura,
Kei Okada
- International Conference on Robotics and Automation (ICRA) Competition, 2015
- (Got 8th place in 28 teams)
-

/filters:format(webp)/prod01/channel_2/media/migration/research-groups/Hero-6--tojpeg_1435150935125_x4.jpg)